I'm fascinated about navigation with scene reconstruction under SLAM.
I'm fortunate to be advised by Professor Lantao Liu. My research will focus on autonomous robotic navigation from sim to real.
I'm the team lead for State Estimation and LiDAR perception in the autonomous racing.
Learning Notes
- Dec 2025 Statistical Learning.
Updates
- June 2025 One paper accepted to RSS 2025 Workshop ROAR.
- May 2025 One paper accepted to International Symposium on Experimental Robotics (ISER) 2025.
- Jan 2025 Story: We pushed the race car to speeds up to nearly 130 mph at the Las Vegas Motor Speedway (LVMS) time trial.
- Sep 2024 One paper accepted to Conference on Robot Learning (CoRL) 2024.
- Sep 2024 Story: Our AI-driven, 1,400-pound race car reached speeds up to nearly 130 mph at the Indy Autonomous Challenge.
- Aug 2023 I started my PhD at Indiana University, advised by Prof. Lantao Liu
Research
Youwei Yu,
Junhong Xu,
Lantao Liu
RSS 2025 Workshop ROAR
Website •
ArXiv
Hassan Jardali,
Durgakant Pushp,
Youwei Yu,
Mahmoud Ali,
Ihab S. Mohamed,
Alejandro Murillo-González,
Md. Al-Masrur Khan,
Lantao Liu
International Symposium on Experimental Robotics (ISER) 2025
ArXiv
Mahmoud Ali, Hassan Jardali, Youwei Yu, Durgakant Pushp, Lantao Liu
Youwei Yu†,
Junhong Xu†,
Lantao Liu
Conference on Robot Learning (CoRL) 2024
Website •
ArXiv •
LinkedIn
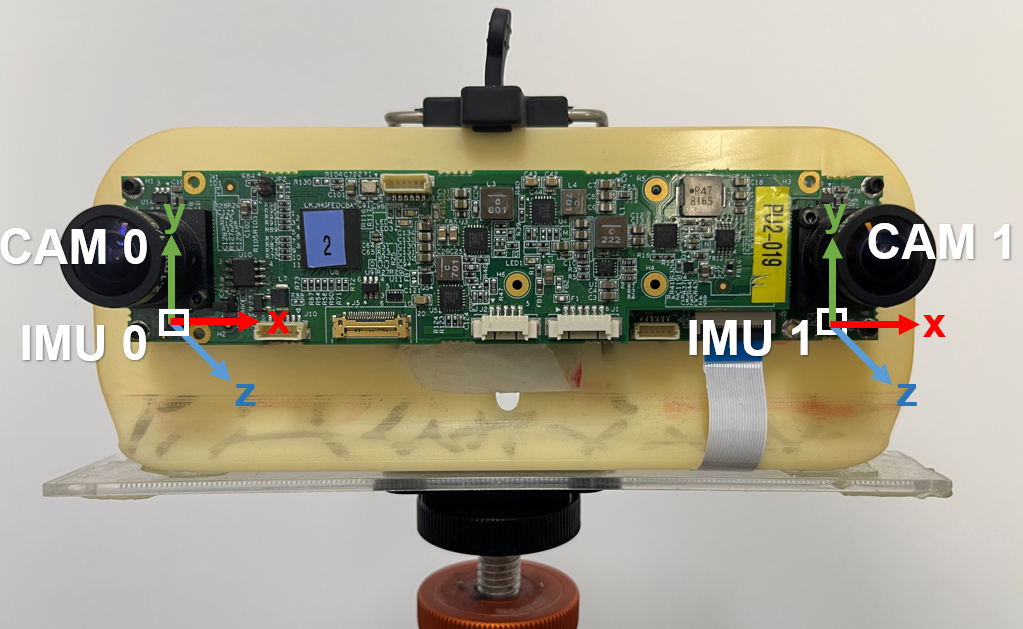 Fast Extrinsic Calibration for Multiple Inertial Measurement Units in Visual-Inertial System
Fast Extrinsic Calibration for Multiple Inertial Measurement Units in Visual-Inertial System
Youwei Yu,
Yanqing Liu,
Fengjie Fu,
Sihan He,
Dongchen Zhu,
Lei Wang,
Xiaolin Zhang,
Jiamao Li
IEEE International Conference on Robotics and Automation (ICRA) 2023
IEEE ICRA •
ArXiv